
はじめに
動作設計は iCAD プロフェッショナル版
制御検証は iCAD マイスター版
が必要になります。
検証モデル
シリンダロッドを往復運動させます。
シリンダは後退端、前進端センサ付き
電磁弁はダブルソレノイド想定で作っていきましょう。
動作は、
前進端センサがON → ロッド戻
後退端センサがON → ロッド出
という制御としてはありえない(笑)単純動作にします。
動作設定
↓のようなハーフカットした単純なシリンダを用意しました。
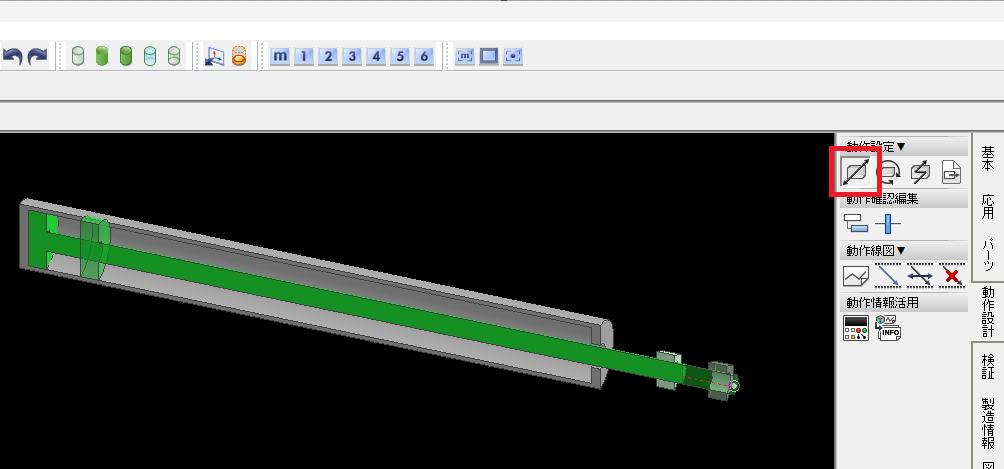
アイコンメニュー → 動作設定 → 直進駆動 をクリック
ロッドを選択 → 基準点(ロッド先端※任意)をクリック
ロッド出方向の任意点で左クリック
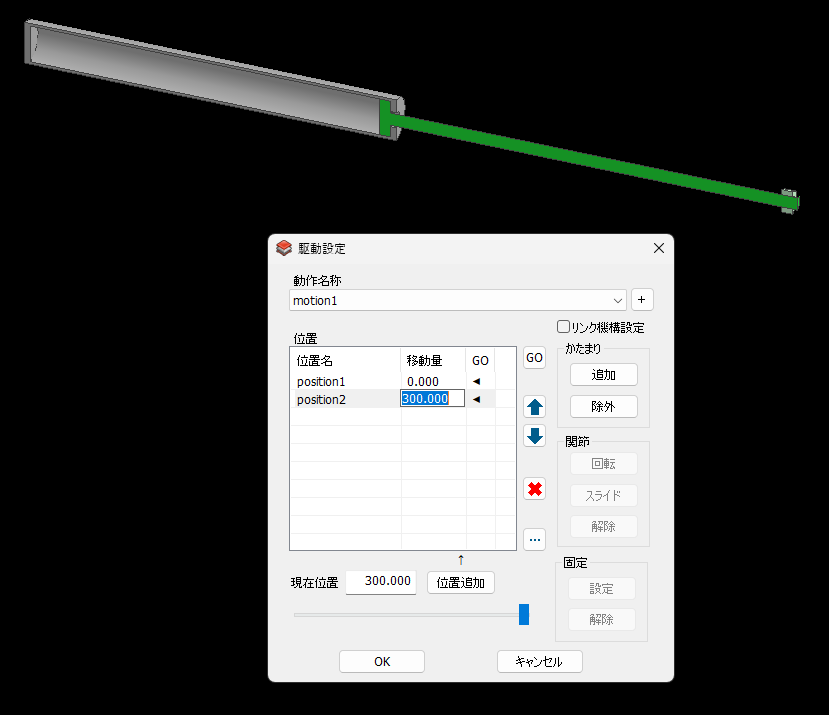
駆動設定ウィンドウが出てきます。

position2の移動量に300と入力後、ENTER。(ロッドも自動で伸びます)
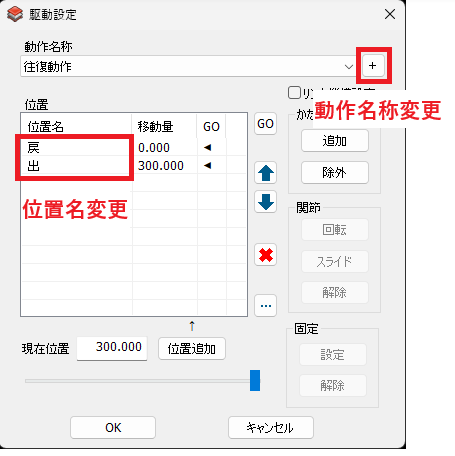
分かりやすくするため名称を変更します
ファイルに名前をつけて保存し、このファイルを閉じます。
以上で動作設計は終了です!
動作設計で動かす場合は動作線図を書きますが、制御検証には引き継げませんので今回は書きません。
制御検証
新規作成
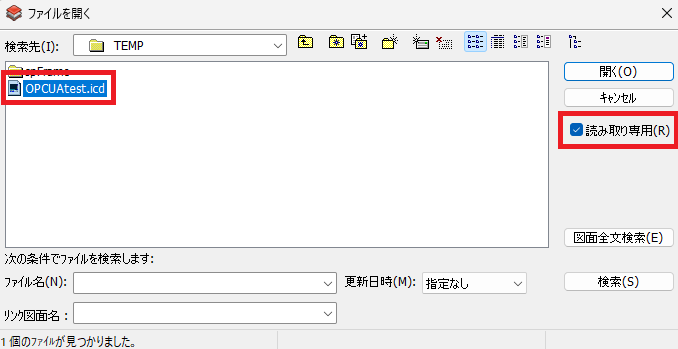
先ほどのファイルを読取専用で開きます。
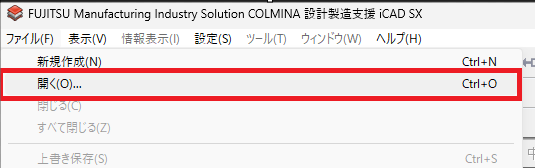
ファイル → 開く
読み取り専用にチェック → 該当ファイルを開く
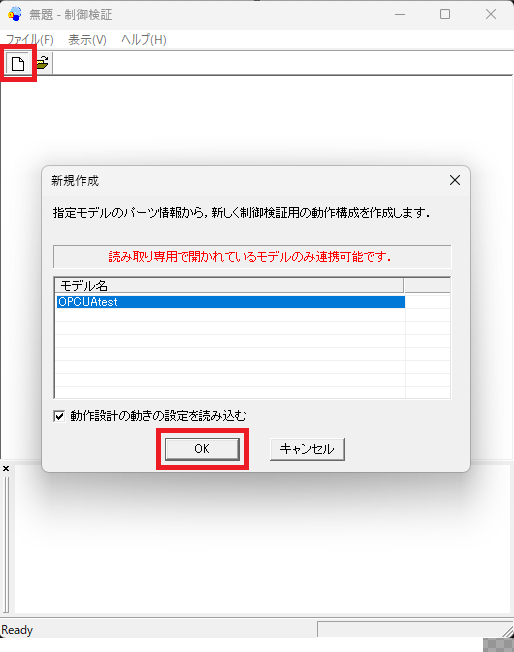
動作検証起動
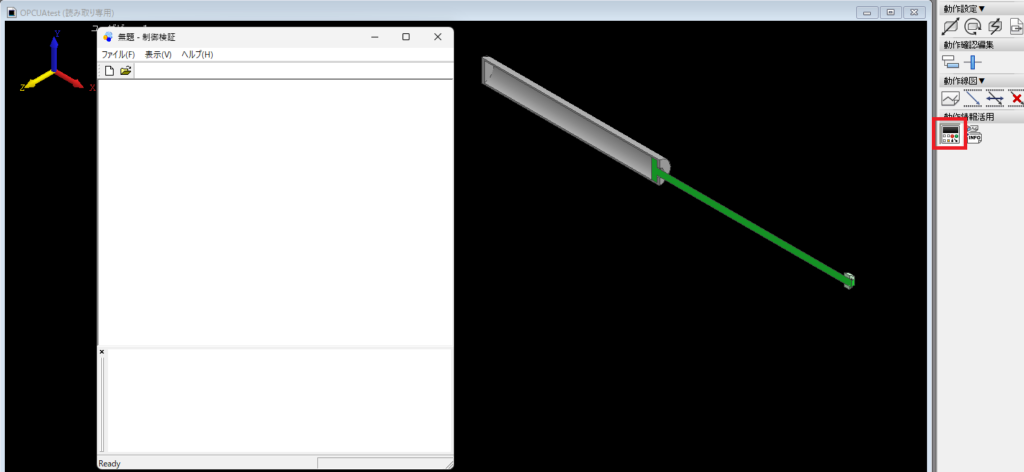
新規作成 → OK
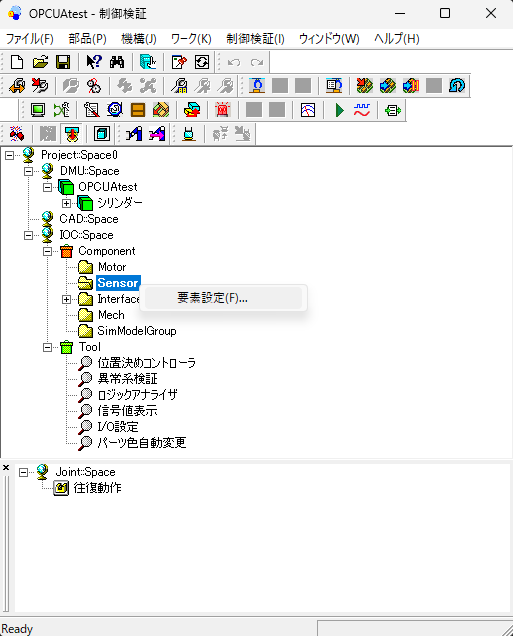
センサ設定
Sensor右クリック → 要素設定
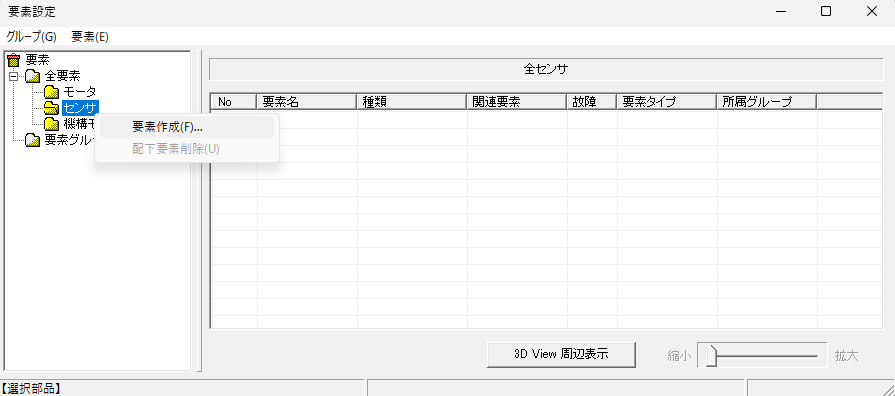
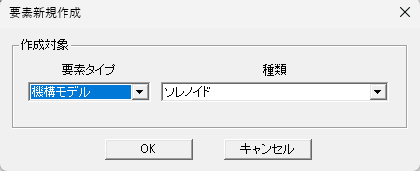
センサ → 要素作成
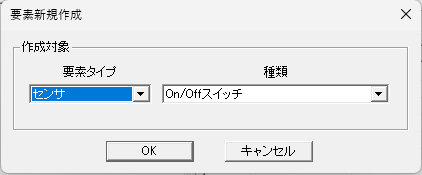
要素タイプ:センサ、種類:On/Offスイッチ → OK
選択をクリック → 図面のロッドを選択
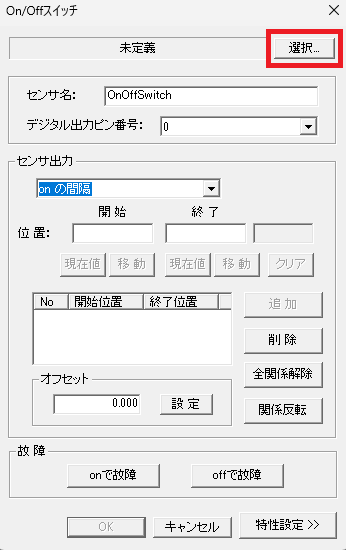
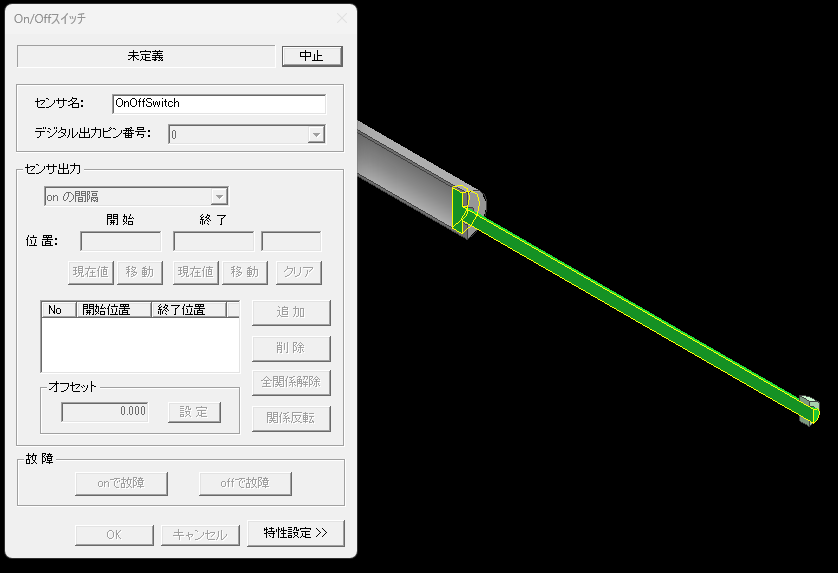
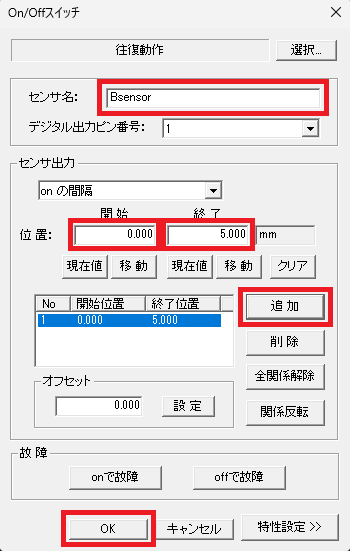
前進端センサを設定します。
①~④を記入・選択
デジタル出力ピン番号は初期値でOK

同じ要領で後退端センサを設定します。
機構モデル設定
シリンダロッドの機構モデルを作成します。
機構モデル右クリック → 要素作成
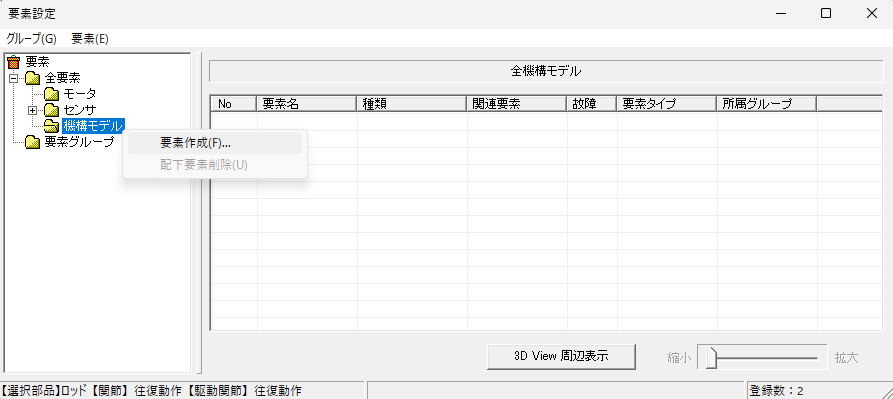
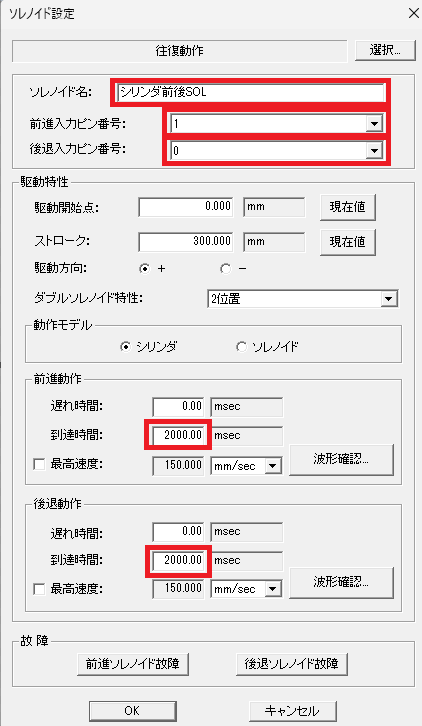
種類はソレノイド
下記のように設定し、OK
保存します
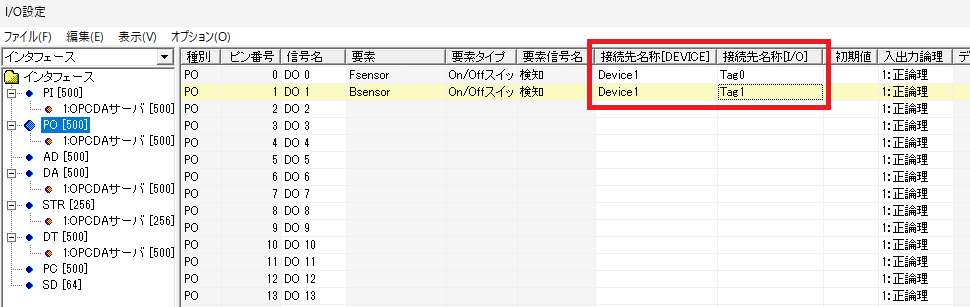
環境設定
制御検証 → 環境設定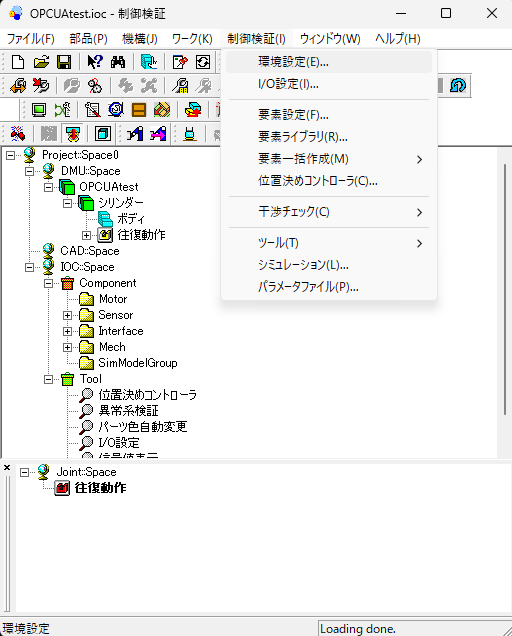
デバイス → デバイス選択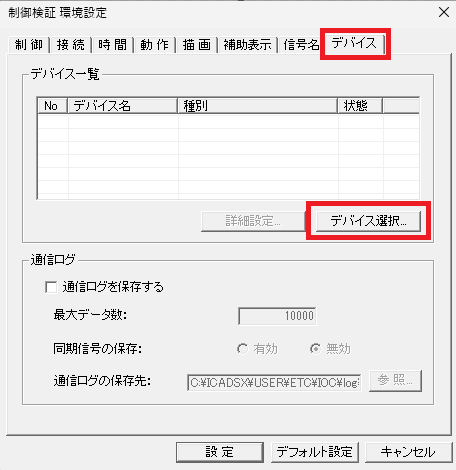
OPCDAサーバの追加 → OK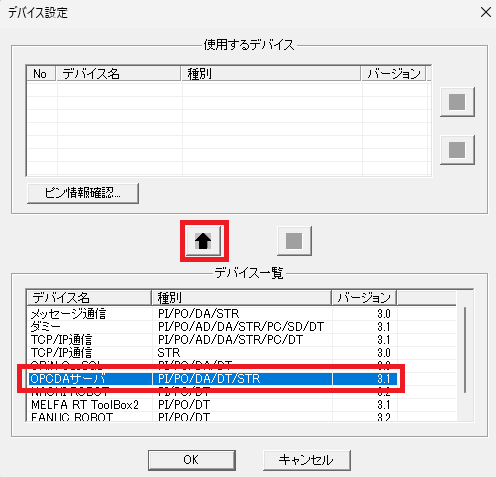
デバイス設定確認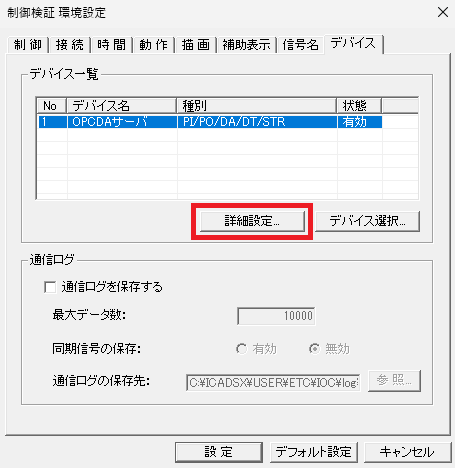
OPCサーバがDxpSERVER Ver.7になっていることを確認
設定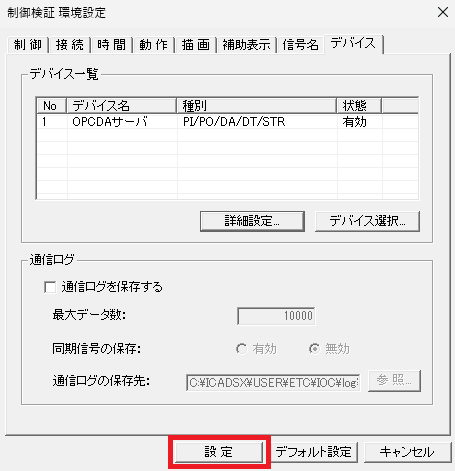
I/O設定
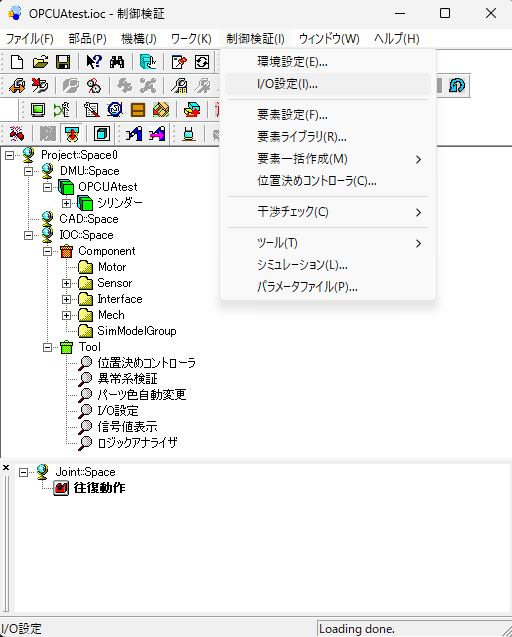
PI設定
接続先名称[DEVICE]:Device1
接続先名称[I/O]:上からTag2,Tag3
と設定
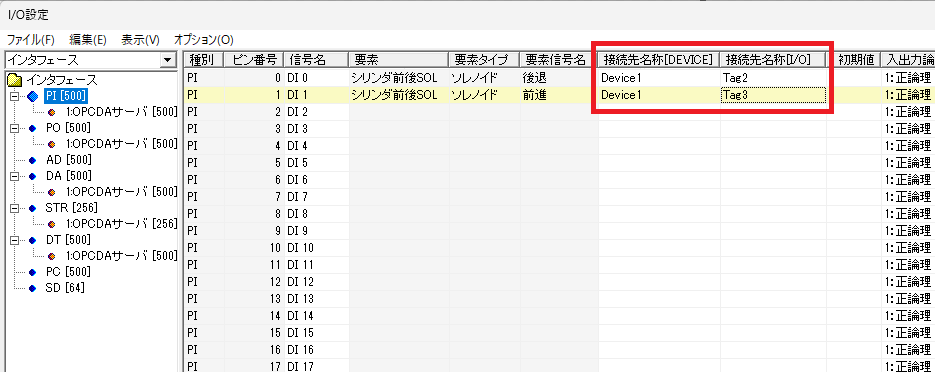
PO設定
接続先名称[DEVICE]:Device1
接続先名称[I/O]:上からTag0,Tag1
と設定
保存
I/O設定ウィンドウを閉じ、保存します。


コメント